



venerdì 13 novembre 2009
Il New Magnetic Engine si basa sul principio della deviazione magnetica generata all'interno di un parallel path. L'intuizione è nata dalle prime analisi e sperimentazioni del Motore di Flynn.
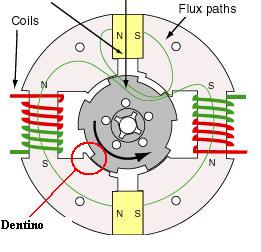
Ciò che differisce dal motore di Flynn è innanzitutto lo spunto sulla partenza, infatti i motori di Flynn avendo una geometria “monofase” non riescono, se non in parte, a prediligere un senso di rotazione, per questo sulla partenza tendono ad avere un andamento irregolare (effetto tergicristallo). Flynn per ovviare a ciò, sulla sua geometria, e più in particolare sulle teste polari dello statore, ha pensato di fare un piccolo “dente” per rendere “irregolare” il passaggio del flusso magnetico. Questo “dente” infatti posto sull’estremità delle teste polari, tende a saturarsi e quindi a trasmettere sul rotore meno flusso rispetto all’estremità opposta, per questo il rotore tenderà ad avviarsi nella direzione dell’estremità senza interruzioni e cioè dove viene attratto con maggior flusso.
La criticità riscontrata con questa soluzione è nell'esperienza che comunque non si avrà mai un avvio deciso e violento, come si può avere in un motore brushless e in un qualsiasi motore trifase, ma avremo solamente un effetto ridotto della “indecisione” del verso di rotazione. Fra l’altro questo tipo di geometria ha il difetto di non avere la reversibilità del moto del rotore in quanto il rotore tenderà ad avviarsi sempre nello stesso senso. Se volessimo poi forzare il rotore a girare in senso opposto, avremo che il motore una volta avviato avrà una resa inferiore dovuta alla saturazione locale del “dentino”.
La nostra idea invece per risolvere il problema dello spunto è quella di sfasare tre rotori sul medesimo asse avente ognuno una sfasatura di 4 gradi. I tre statori sono invece allineati e paralleli fra di loro. Questo ci permette di avere un motore Trifase e di non avere quindi nessun tipo di problema sullo spunto e sulla reversibilità del moto. Grazie a ciò abbiamo la possibilità di sostituire qualsiasi motore elettrico con il prototipo MK12 senza incorrere in nessun tipo di problema di incompatibilità.
Un'altra miglioria che abbiamo apportato è il maggior rapporto peso potenza. Ciò consiste nello sfruttare al meglio il volume di lamierini ferromagnetici presenti sul motore.
Una regola fondamentale da seguire è il rapporto fra le aree polari statoriche e le aree polari del nucleo dove è avvolta la bobina. Tale rapporto a differenza di come si pensi, effettuando simulazioni e prove con il parallel path, deve essere rigorosamente di 1:1, e cioè la grandezza dell’area polare del nucleo della bobina deve essere uguale a quello delle teste polari dello statore. Flynn, preferisce invece avere un rapporto fra le aree polari statoriche e quelle del nucleo bobina di 2 : 1. Questa decisione di rapporto 2 : 1 scaturisce da un analisi fatta con dei software ad elementi finiti, e quindi un analisi fatta su un modello statico. In effetti queste analisi sembrano confermare che avendo un rapporto di 1 : 1, le aree polari statoriche tendono alla saturazione e quindi al mancato passaggio di tutto il flusso magnetico a disposizione. In realtà questa condizione è vera solamente a livello statico, infatti in un parallel path abbiamo che la forza di attrazione di un magnete risulta quadruplicata sulle teste polari.
Ciò significa che abbiamo un flusso circa doppio a quello del singolo magnete e della bobina avendo bisogno quindi per forza di cose di un rapporto di 2 : 1. Questa condizione è però valida solamente se il modello risulta statico, infatti sarebbe impossibile ottenere in un modello dinamico, un flusso doppio a quello generato dalla bobina. Ciò significherebbe che generando un flusso di 0,5T ad una frequenza di 100 Hz, ci ritroveremo sulle teste polari un flusso di 1 T sempre a 100 Hz. Ma ciò è praticamente impossibile in quanto la forza (flusso) per lo spostamento (100 Hz) determina un lavoro. E ciò vorrebbe dire che otterremmo più lavoro di quello che “immettiamo”, per questo il rapporto deve essere assolutamente di 1 : 1, in quanto il flusso generato dalla bobina è esattamente quello che troveremo sulle teste polari.
Non bisogna lasciarsi ingannare dai modelli statici in quanto in essi il parallel path può essere paragonato ad una leva, dove ponendo un peso X si riesce a sollevare un peso più grande in proporzione alla leva, ma il lavoro speso e compiuto è lo stesso in quanto avremo spostamenti diversi dei due pesi.
Il vantaggio che si ottiene dal parallal path inserito in un modello dinamico è la minor strada che il flusso della bobina deve fare per arrivare sul rotore, in quanto il flusso presente sul rotore è quello Deviato dalla bobina. Il vantaggio di questa applicazione è oltretutto che la bobina non risente delle perdite di flusso presenti quando il rotore viene frenato applicando un carico, in quanto la bobina risente solamente delle forze elettromotrici inverse che compiono effettivamente lavoro utile. Il flusso disperso e che quindi non compie lavoro, è quello dei magneti permanenti. In virtù di quanto detto il prototipo MK12 riesce a mantenere rese elevate sopra il 90% in qualsiasi tipo di condizione di carico, a differenza degli altri motori elettrici che hanno invece un picco di rendimento limitato al loro range di utilizzo.